Prethodno poglavlje
| Pocetna strana | Sledece
poglavlje
5. ZAVRŠNI
UREĐAJI
U glavi 1. ove knjige govorili smo
o klasifikaciji poslova koje današnji roboti obavljaju: prenos materijala,
procesne operacije, montaža, kontrola itd. U skladu sa tim, u glavi
2. uveli smo pojam završnog uređaja koji, smešten na
"vrhu" robota, obezbeduje izvršenje postavljenog zadatka.
Podsetićemo se da smo lanac robota funkcionalno razdvojili na minimalnu
konfiguraciju (ruka) i završni mehanizam (šaka robota). Završni
mehanizam se sastoji do složenog zgloba šake (jedan do tri stepena
slobode) i završnog uređaja. Dakle, završni uređaj je, sa
stanovišta geometrije robota, poslednji segment u lancu. Taj poslednji
segment često smo zvali hvataljka zato što su u
najčešće upravo radi o uređaju za hvatanje predmeta.
Medjutim, u ovoj glavi razmatraćemo čitav niz funkcionalno
različitih završnih uređaja, u zavisnosti od zadatka koji robot
treba da izvrši. Sa stanovišta funkcije, znači, završni
uređaj je ono što obezbeduje interakciju robota sa radnom okolinom.
Robot se često projektuje kao sistem opšte namene. Zatim mu se dodaje
završni uređaj čime se robot osposobljava za izvršenje
određenog zadatka. Ako se menja namena robota, promeniće mu se samo
završni uređaj, na primer, umesto uređaja za hvatanje stavke se
zavarivačke elektrode. Ovakve mogućnosti potvrđuju fleksibilnost
robota kao elementa proizvodnog sistema.
5.1. VRSTE ZAVRŠNIH UREĐAJA
Završne uređaje
možemo funkcionalno podeliti u tri grupe:
- hvataljke,
- alati i
- merno-kontrolni uređaji.
Hvataljke su uređaji kojima
se određeni radni predmet može uhvatiti, držati tokom
prenošenja i na kraju ispustiti. Uglavnom se sreću kod zadataka
prenošenja radnog materijala, kod opsluživanja mašina
(stavljanje radnog predmeta u mašinu i vađenje iz nje) kao i u
zadacima montaže. Kada koristimo termin "uhvatiti" nameće
se ideja hvatanja pomoću dva ili više prstiju. Međutim, hvatanje
podrazumeva bilo koji postupak kojim se obezbeduje čvrst kontakt sa
predmetom radi njegovog prenošenja (na primer, pomoću magneta ili
vakuumske sisaljke).
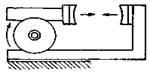
Različite vrste alata sreću se kao završni uređaji kod robota koji obavljaju procesne operacije. Pod alatom tada podrazumevamo one uređaje kojima se izvršavaju neke radne operacije na predmetu proizvodnje:zavarivačka klešta,pištolj za prskanje farbe,tocilo za brušenje i sl.
Konačno, u zadacima kontrole proizvoda robot na svom "vrhu" nosi različitu mernu opremu neophodnu za izvršenje zadatka (npr. laserski uređaj za kontrolu kvaliteta površine).
Rekli smo već da se pri
prelasku na novi zadatak ili novu proizvodnu operaciju mora promeniti i
završni uređaj. Ako jedan robot obavlja niz proizvodnih operacija na
radnom predmetu, potrebno je u relativno kratkom roku promeniti veći
broj završnih uređaja. Ovo je posebno slučaj kod takozvane
fleksibilne proizvodnje kod koje svaki novi radni predmet može biti
drugačiji i zahtevati drugačiju obradu. Da bi se omogućila brza
promena završnog uređaja, projektuju se različiti sistemi
vezivanja završnih uređaja za vrh robota. Moguća je, na primer,
veza pomoću magneta ili neka drugačija veza ali se, svakako, zamena i
vezivanje uređaja mora obavljati automatski tj. bez učešća
čoveka. Na ovaj način dolazimo i do jedne mogućnosti koja
ukazuje da prethodnu podelu završnih uređaja ne treba shvatiti
suviše kruto.Naime, promena alata može se izvesti tako da se
različiti alati uzimaju hvataljkom robota, a onda se njima izvršavaju
proizvodne operacije. Tako se brzo mogu menjati završni uređaji i
robot za kratko vreme može izvršiti niz proizvodnih i kontrolnih
zadataka.
5.2. HVATALJKE
ROBOTA
Već smo rekli da je glavna
funkcija svake hvataljke da ostvari čvrst (krut) kontakt sa radnim predmetom,
da taj kontakt održi tokom određene putanje prenošenja i
konačno da oslobodi predmet. Obično govorimo o hvatanju,
prenošenju i ispuštanju predmeta.
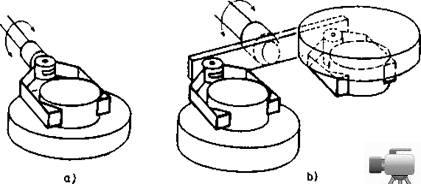
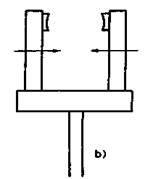
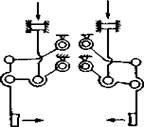
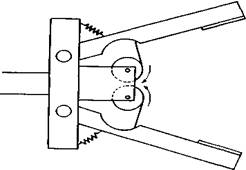
SI.5.1. Obična (a) i
dupla (b) hvataljka.
Hvataljke mogu biti obične ili duple (sl.5.1). Dupla hvataljka je uređaj koji se sastoji od dve hvataljke montirane na vrhu robota. Ovakve hvataljke sreću se uglavnom kod zadataka u kojima robot stavlja i vadi radne predmete iz neke mašine (na primer prese). Tada robot jednom hvataljkom prinosi predmet, zatim drugom hvataljkom vadi prethodni predmet iz mašine pre nego što unutra stavi novi; konačno prethodni predmet se odlaže na to predviđeno mesto. Tako se brzo može izvršiti zamena radnog predmeta u mašini.
Hvataljke možemo podeliti i
prema načinu hvatanja na:
- hvataljke sa mehaničkim
prstima,
- hvataljke sa vakuumskim,
magnetnim ili athezionim sistemom hvatanja,
- univerzalne hvataljke.
5.2.1. Hvataljke sa prstima
Hvataljke sa prstima su
najčešće vrsta uređaja za hvatanje. Prema broju prstiju
mogu biti: hvataljke sa dva prsta i hvataljke sa više prstiju. U
industrijskim primenama pretežno srećemo hvataljke sa dva prsta. O
njima ćemo ovde govoriti više, a hvataljke sa više prstiju
opisaćemo u odeljku o univerzalnim hvataljkama.
Druga podela koja polazi od
načina hvatanja deli hvatanje na spoljašnje i unutrašnje
(sl.5.2).
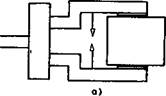
Sl.5.2. Spoljašnje (a) i
unutrašnje (b) hvatanje
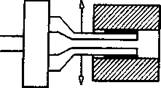
Prema načinu kretanja prstiju
hvataljke možemo podeliti na hvataljke sa obrtnim kretanjem prstiju i
hvataljke sa translatornim kretanjem prstiju (sl.5.3).
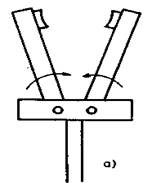
Sl.5.3. Obrtno (a) i translatorno
(b) kretanje prstiju
Razlike medu hvataljkama postoje i
po načinu održavanja krutog kontakta hvataljke sa predmetom. Jedan
način sastoji se u tome da se postave takva geo-metrijska ograničenja
koja će onemogućiti relativno kretanje predmeta u odnosu na hvataljku
(sl.5.4a). U drugom pristupu, geometrija hvatanja je takva da dopušta
pomeranje predmeta u odnosu na hvataljku (dakle i ispadanje) ali do pomeranja
ne dolazi zbog delovanja sile trenja (sl.5.4b).
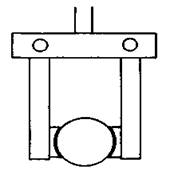
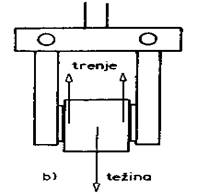
SI.5.4. Dva načina
zadržavanja predmeta
Razvrstajmo sada hvataljke prema
njihovoj kinematičkoj shemi tj. načinu transformisanja kretanja
pogonskog motora u kretanje prstiju (hvatanje). Istovremeno, to je i podela
prema načinu ostvarivanja sile hvatanja. Pogonski sistem obezbedjuje
pogonsku silu ili momenat Pp, a posredstvom određenog mehanizma ostvaruje
se sila hvatanja Fh. Uočavamo sledeće tipove hvataljki:
- hvataljke sa zglobnim
mehanizmom,
- hvataljke sa zupčastom letvom,
- hvataljke sa klinom,
- hvataljke sa zavrtnjem,
- hvataljke sa užetom i
koturom,
- ostali tipovi hvataljki.
Opišimo nešto detaljnije sve nabrojane tipove.
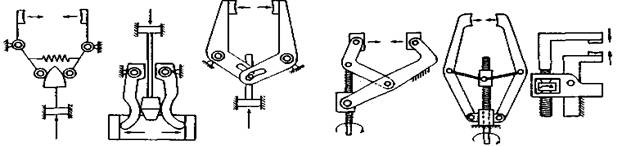
Hvataljke sa zglobnim mehanizmom
najbolje ćemo ilustrovati nizom primera prikazanim na slici 5.5. Zglobni
mehanizam se može pokretati, na primer, hidrauličnim cilindrom.
Pogonsko kretanje (p) i kretanje hvatanja (h) označeni su na slici, a iste
oznake važe i za sheme narednih tipova hvataljki. Dejstvo pogona može
biti dvosmerno i tada je moguće ostvariti silu i pri otvaranju i pri
zatvaranju hva-taljke. Dejstvo može biti i jednosmerno, kada silu
ostvarujemo samo pri zatvaranju hvataljke, a za otvaranje se koristi neki
elastični elemenat (na primer, opruga).

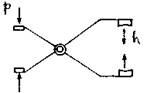
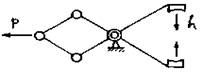
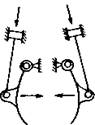
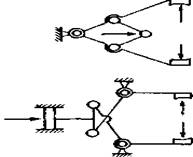
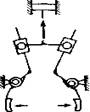

SI.5.5. Zglobni mehanizmi za
hvatanje
SI.5.6. Hvataljke sa
zupčastom letvom
Hvataljkesa zupčastom letvom
karakteristične su po kinematičkom paru
zupčanik-zupčasta letva kojim se obrtno kretanje prevodi u
translaciju i obrnuto (sl.5.6).
Princip rada hvataljke sa klinom prikazan je shematski na slici 5.7. Klin se pokreće pogonskim motorom, a mehanizam prati kretanje klina i tako ostvaruje hvatanje.
Naglasimo još da ne mora biti
u pitanju klin već bilo koji istureni zub čije kretanje će
preko pratećeg mehanizma dovesti do hvatanja (sl.5.7c)
Nekoliko varijanti hvataljke sa
zavrtnjem prikazano je na slici 5.8.
SI.5.7. Hvataljke sa
klinom
SI.5.8. Hvataljke sa zavrtnjem
SI.5.9. Hvataljka sa užetom i
koturom
Rad hvataljke sa užetom i koturom zasniva se na obrtanju kotura, čime se namotava uže i tako povlače prsti hvataljke (sl.5.9). Ova hvataljka mora imati neki elastični momenat (npr. opruga) koji će omogućiti kretanje prstiju na suprotnu stranu.
Postoji još niz hvataljki
različitog načina rada koje se projektuju za specijalne namene.
Jedan od čestih principa koji se primenjuju je širenje gumenog
rezervoara kada se u njemu povećava pritisak (naduvavanje). Na slici 5.10.
prikazane su dve mogućnosti za korišćenje ovog principa. U
slučaju (a) naduva se valjkasti rezervoar koji, kada se raširi u
unutrašnjosti predmeta, ostvaruje sa predmetom čvrst kontakt.U
slučaju (b) naduvaju se prsti koji se takvog oblika da se pri širenju
istovremeno i deformišu tako da se ostvari hvatanje.
5.2.2. Vakuumske, magnetne i
athezione hvataljke
Ova tri tipa hvataljki razmatramo zajedno jer imaju određenih sličnosti. U pitanju su uređaji koji se na neki način "zalepe" za predmet.
Vakuumske sisaljke (sl.5.11)
ostvaruju čvrst kontakt sa predmetom na taj način što pumpa
izvlači vazduh stvarajući tako potpritisak. Radi ostvarivanja
zadovoljavajućeg zaptivanja, ili sisaljka ili radni predmet moraju biti on
mekanog materijala. Najčešće su u pitanju mekane ivice
sisaljke. Hvataljka se sastoji od jedne ili više sisaljki.Uslov za
korišćenje vakuumskih hvataljki je da površina predmeta koji se
hvata bude ravna i čista. Zato se ove hvataljke najčešće
upotrebljavaju za rad sa pločastim predmetima, na primer, od metala ili
stakla.
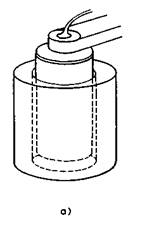
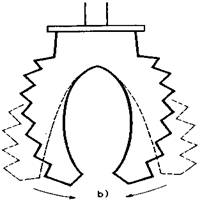
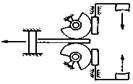
SI.5.10. Hvatanje na principu
širenja pod pritiskom
SI.5.11. Vakuumska sisaljka
Magnetne hvataljke ostvaruju vezu sa gvozdenim i čeličnim predmetima pomoću privlačne sile stalnog ili elektromagneta. Pogodnost ovih hvataljki je što ne zahtevaju ravnu i čistu površinu. Međutim, zbog mogućeg zaostalog magnetizma u predmetu, ove hvataljke se mogu uvek koristiti. Napomenimo još neke specifičnosti. Ukoliko hvataljka koristi stalni magnet, tada je neophodno predvideti poseban sistem za oslobođenje predmeta. Često se u tu svrhu koristi mali pneumatski cilindar sa klipom. Kada predmet treba ispustiti, klip gurne predmet dovoljnom silom i on se otkači od magneta. Konačno, javlja se i dopunski problem pri radu sa gvozdenim ili čeličnim pločama. Kako magnetno polje prolazi u dubinu čelika, to će privući ne samo jednu već više ploča naslaganih jedna na drugu.
Athezione hvataljke se
"zalepe" za predmet posredstvom površine na koju je nanesena
neka materija koja sa materijalom predmeta ostvaruje dovoljnu athezionu silu.
5.2.3. Univerzalne i prilagodljive
hvataljke
Pod pojam univerzalnih i prilagodljivih
hvataljki podrazumevaju se hvataljke koje mogu da hvataju predmete
različitog oblika i veličine. U pitanju su razna konstruktivna
rešenja koja omogućavaju hvataljki da prilagođava svoj oblik
predmetu. Osim toga univerzalnim hvataljkama smatraju se i hvataljke sa
više prstiju koje, po ugledu na šaku čoveka, mogu hvatati
predmete različite po obliku i veličini.
SI.5.12. Hvataljka sa
prilagodljivim oblikom prstiju
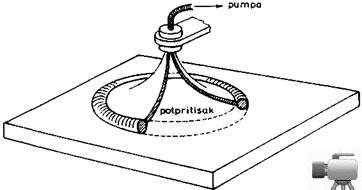
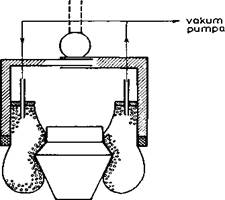
Navešćemo dva primera prilagodljivih hvataljki. Na slici 5.12. prikazana je hvataljka čija su dva prsta napravljena u vidu mekanih plastičnih vrećica ispunjenih sitnim kuglicama od tvrdog materijala. U svom osnovnom stanju ovakvi prsti su veoma rastresiti. Otuda, kada hvataljka počinje da hvata neki predmet, prsti se postepeno oblikuju prema površini predmeta koji hvataju. Dakle, prsti prilagodavaju svoj oblik.Kada je hvatanje završeno tada vakuumska pumpa izvlači vazduh iz prstiju. Vrećica steže kuglice koje sada vrše jak pritisak jedna na drugu. Takvi prsti više nisu rastresiti nego veoma kruti, ali oblikovani prema predmetu.
Drugi način da se postigne prilagodljiv oblik prstiju je korišćenje člankovitih univerzalnih prstiju (sl.5.13). Potezanjem užeta prsti se skupljaju i pri tome obuhvataju predmet prilagodavajući mu se.
Hvataljke sa više prstiju
najčešće imitiraju čovekovu šaku, pa imaju, u principu,
pet prstiju. Nekada imaju tri prsta jer čovek niz radnji obavlja upravo sa
tri prsta.
Pokretanje prstiju predstavlja
poseban problem. Slika 5.14. prikazuje jednu mogućnost za pokretanje
jednog od zglobova prsta. Pokretanje se ostvaruje povlačenjem trake
(užeta). Očigledno, na ovaj način svaki zglob zahteva poseban
pogon i postavlja se veoma složen problem ostvarivanja koordinisanog i
funkcionalnog kretanja prstiju.
SI.5.13. Člankoviti
univerzalni prsti
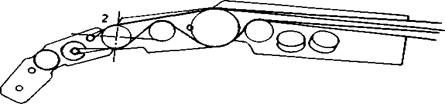
SI.5.14. Pokretanje zgloba na
prstu
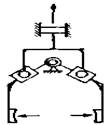
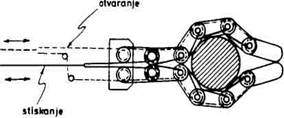
SI.5.15. Hvataljke sa tri motora
Bez obzira na to dali imaju tri ili pet prstiju ove hvataljke su visoko redundantne. Da bi se razrešio problem redundantnosti često se pribegava uvođenju međuzavisnosti (zadatim sinergijama) koje imitiraju način hvatanja kod čoveka. Na slici 5.15. prikazana je hvataljka kod koje je konstruktivnim ugrađivanjem pogodne sinergije broj stepeni slobode smanjen na tri. Otuda se i pokreće sa tri motora. Motor 1 vrši obrtanje palca (prst 1 na slici). Motor 2 vrši savijanje prstiju 2 i 3, motor 3 savijanje prstiju 4 i 5. Par prstiju (npr. 2 i 3) savija se uporedo sve dok neki od njih ne dodirne predmet. Tada, zahvaljujući sistemu opruga, taj prst ostaje da pritiska predmet, a drugi nastavlja savijanje dok i on ne dodirne predmet.
Na kraju izlaganja o hvataljkama
reći ćemo da je osnova proračuna dinamičkog
opterećenja hvataljke i sile hvatanja prikazana u prilogu P5.
5.3. ZAVRŠNI
UREĐAJI ZA PROCESNE OPERACIJE I KONTROLU
Već smo rekli na početku
ove glave da se roboti često koriste u proizvodnim operacijama koje
podrazumevaju da se izvrši obrada radnog predmeta odgovarajućim
alatom ili pak kontrola izvršene obrade. Dakle, robot ne opslužuje
mašinu koja vrši određenu obradu, već neposredno
izvršava traženu operaciju. Stoga se robot oprema odgovarajućim
završnim uređajem. Najčešće primere smo već spominjali:
zavarivačka klešta u zadatku tačkastog zavarivanja i
pištolj za prskanje boje u zadacima bojenja. Ako uzmemo u obzir veliku
raznolikost primene robota jasno je da je bilo neophodno razviti čitav niz
specifičnih uređaja koji odgovaraju pojedinim primenama. Otuda je
veoma teško govoriti o ovim uređajima na jednom mestu. Pogodnije ih je
opisati prilikom razmatranja primene robota, a to je u glavi 10.